
GREEENxLIDAR
360° Object Recognition System
GREEENxLIDAR enables real-time 3-D recognition of humans, things, structures, etc.
existing in the surroundings.
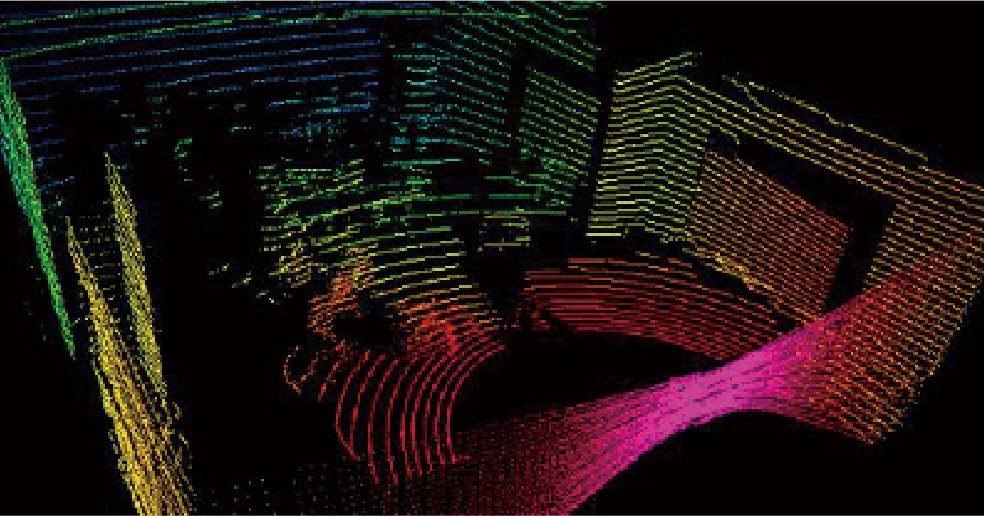
Enables real-time capture of the real 3-D world
GREEENxLIDAR 360° Object Recognition System enables real-time 3-D recognition of humans, things and structures existing in the surroundings. Based on 3-D data analysis, even when moving, it can detect, identify, analyze, and track objects such as humans and other things existing there, while recognizing its current location and the structures in the surrounding environment.
We provide essential features required for realizing unmanned automation that becomes increasingly important in various scenes, such as autonomous driving, unmanned construction, stock and transport tracking, and human flow detection and analysis.
Main Functions
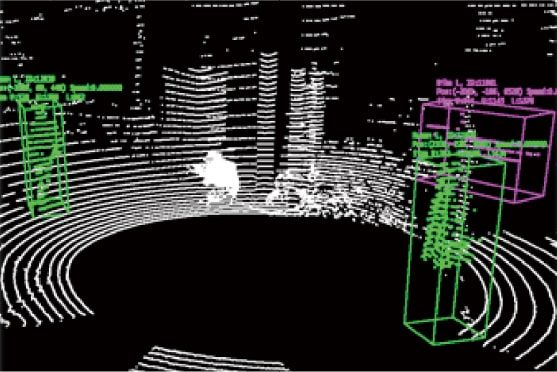
1. Object recognition
The system can detect humans and other things in the scene, and identify, analyze, and track them. Detection and tracking of objects such as human beings and vehicles enable conditional judgements for autonomous mobile systems, human flow analysis, and etc.
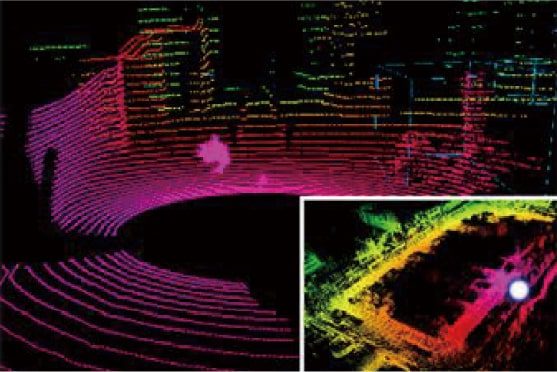
2. Self localization
The system can estimate moving vectors of the observation point via sequential 3-D data, and recognize the location in real world in real-time. It can recognize self location for autonomous driving, acquiring the placement of cargo by tracking carriers, and etc.
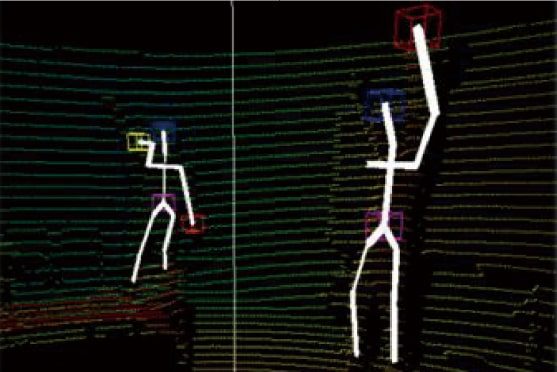
3. Human motion analysis
It can recognize behavior of humans nearby such as hand movement and body posture. This enables various functions such as detection of dangerous scenarios and the interaction of service robots with users.
4. Moving observation integration
Based on self localization, data obtained via moving observation could be integrated and output as 3-D map. It enables a three-dimensional grasp of a specific area. You can confirm construction results and verify any differences from plan.

Applications
1. Surrounding environment recognition for autonomous driving
Detection and identification of humans and other things existing in the surrounding environment while recognizing their own position in the real world enables formulation of the action plan in various autonomous mobile systems used in automobiles, construction machines, carriers and service robots.

2. Supporting unmanned construction
Self location can be recognized even where GPS is unavailable, such as inside a facility or underground. Detection of nearby vehicles / operators and real-time measurement of construction progress, such as dimensions, provide comprehensive support for unmanned construction.

3. Tracking of cargo transportation at logistics
Movement path of carriers is tracked and placement of transported cargo is recorded. Even for cargo difficult to manage due to problems such as size, you can confirm and capture the placement easily when it becomes necessary.

4. Human flow analysis for a wide area
Using LIDAR with wide field of view, It is possible to measure human flows in a wider area than ever before. Multiple sensors located efficiently enable analysis of stagnation points even in large scale facilities such as airports.
