
GREEENxLIDAR
360°オブジェクト認識システム
周囲に存在する人、モノ、構造物などのリアルタイム3D認識を実現します。
3次元実世界のリアルタイムな把握が可能に
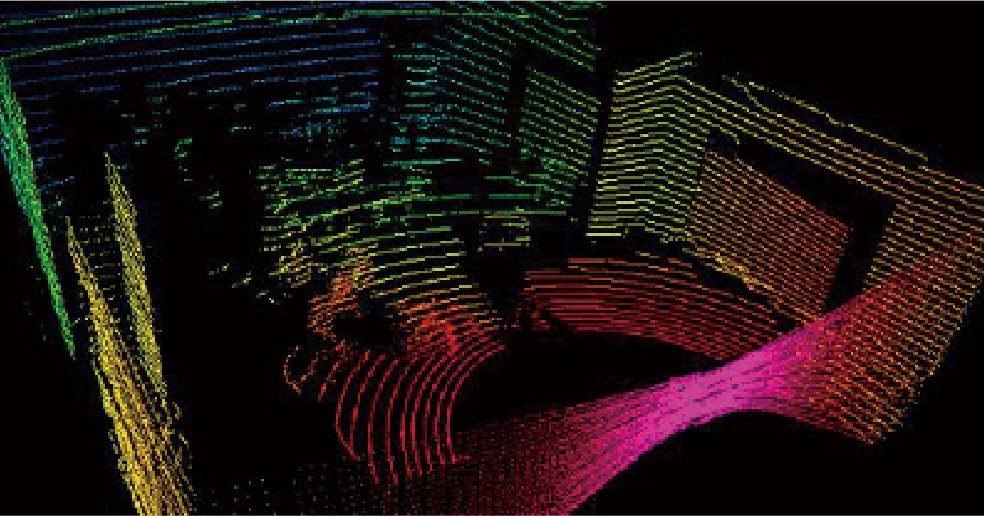
GREEENxLIDAR 360°オブジェクト認識システムは、周囲に存在する人、モノ、構造物などのリアルタイム3D認識を実現するシステムです。3Dデータ解析により、移動しながらでも周辺環境の構造物及び自己位置を認識しつつ、その場に存在する人やモノ等のオブジェクトを検出し、識別・解析・追跡を行うことができます。
自動運転、無人化施工、在庫・搬送追跡、人流検知・動線解析等、
様々なシーンにおいて重要性を増す無人化・自動化の実現に不可欠な機能を提供します。
製品の機能
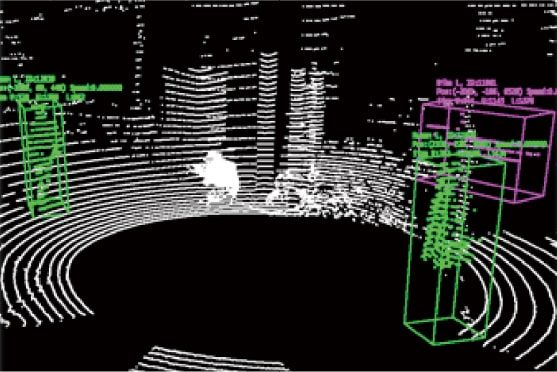
1. オブジェクト認識
シーンの中から人やモノを検出し、識別・解析・追跡することができます。特定の範囲に存在する人間や車輌などを検知してトラッキングすることで、自律移動システムにおける状況判断や、人流・動線の解析などが可能となります。
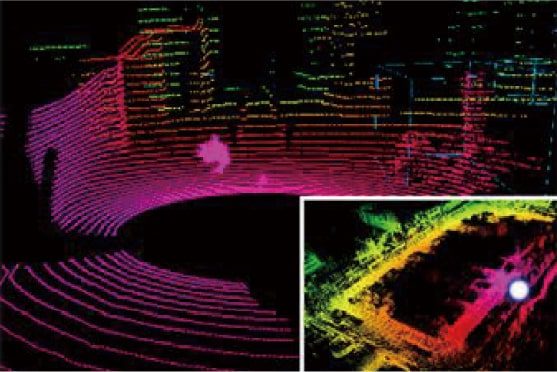
2. 自己位置認識
連続的な3Dデータから観測点の移動量を推定し、実世界における位置をリアルタイムで認識することができます。自動運転における自己位置の認識や、搬送機器のトレースによる貨物配置の把握などを可能とします。
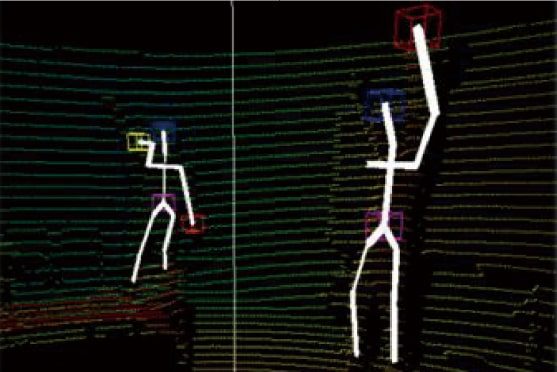
3. 人体動作解析
近接する人間について、手の動きや姿勢といった動作を認識することが可能です。危険なシーンの検出や、サービスロボットにおけるインタラクションなど、多様な機能の実現を可能とします。
4. 移動観測統合
移動観測により得られるデータを自己位置認識に基づき統合し、3次元マップとして出力することが可能です。特定の範囲を立体的に把握することが可能となり、施工結果の確認や計画との差異の検証に使用することができます。

適用例
1. 自動運転における周辺環境認識
自動車・建設機械・搬送機器・サービスロボットなどの自律移動システムにおいて、実世界における自己の位置を認識しつつ、周辺環境に存在する人やモノを検出・識別し、行動計画の策定を可能とします。

2. 無人化施工支援
施設内や地下といったGPSの使用が困難な場所においても自己位置を認識することができます。周辺の車輌・作業員の検出や、寸法などの施工状態のリアルタイムな計測により、無人化施工を総合的に支援します。

3. 物流現場での貨物搬送トレース
搬送機器の移動経路をトレースし、運搬された貨物の場所を記録します。サイズなどの問題で管理が難しかった資材についても、必要になった時点で容易に配置を確認・把握することが可能です。

4. 広範囲を対象とした人流解析
広い視野を持つLIDARにより、従来より広範囲を対象とした人流の計測が可能です。複数のセンサを効率的に配置することで、空港などの大規模施設においても滞留箇所などの解析を実現することができます。
